
This object is in archive!
How to understand the real deviations in image map calibration?
Answered
Hi,
Sorry and happy new year! I have another new question:
Locus's image map calibration is excellent, but I am confused by a question:
How does Locus calculate the real deviations for each predefined point?
According to my understanding, these predefined points are all specified by me.
Why can Locus calculate their real deviations???
I even think why the real deviation of my predefined point can't be 0?
Of course I know this is impossible, but what is the basis of Locus?
https://www.locusmap.app/how-to-get-the-picture-of-map-from-a-tourist-guide-into-locus/
Many thanks!
 The same question
The same question
Hi,
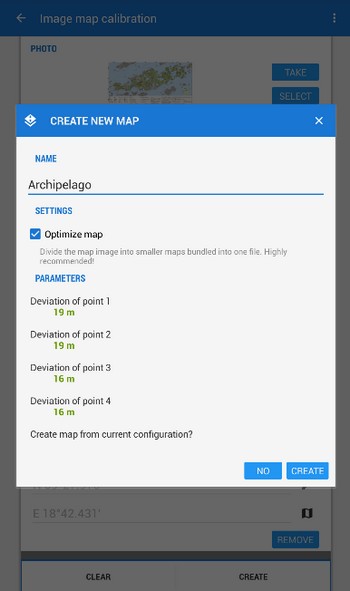
as you probably know, the image calibration in Locus consists of two steps:
1) you pick a location on a background georeferenced map
2) you pick the same location on the map image that you want to calibrate according to the background map
Even though you pick the locations as accurately as possible, there is always a deviation of a few meters between these two picks - due to the inaccuracy of the manual selection. It is theoretically possible to have 0 deviation when you manage to match the two picks exactly but it is actually quite improbable. But taking the map scale into account, there is nothing to worry about.
Hi,
as you probably know, the image calibration in Locus consists of two steps:
1) you pick a location on a background georeferenced map
2) you pick the same location on the map image that you want to calibrate according to the background map
Even though you pick the locations as accurately as possible, there is always a deviation of a few meters between these two picks - due to the inaccuracy of the manual selection. It is theoretically possible to have 0 deviation when you manage to match the two picks exactly but it is actually quite improbable. But taking the map scale into account, there is nothing to worry about.
Tip: look for 4 points on the picture, as widely spread as possible. I always take a junction or crossroads.
Then 'I use a strong zoom. The point I put in the middle of a path and there in the middle of the outgoing path. I do this on both pictures. I usually get 1 m deviation.
Tip: look for 4 points on the picture, as widely spread as possible. I always take a junction or crossroads.
Then 'I use a strong zoom. The point I put in the middle of a path and there in the middle of the outgoing path. I do this on both pictures. I usually get 1 m deviation.
Replies have been locked on this page!